RESEARCH
SatSOM: Saturation Self-Organizing Maps for Continual Learning
I. Urbanik, P. Gajewski
Journal of Artificial Intelligence and Soft Computing Research
25 February 2026
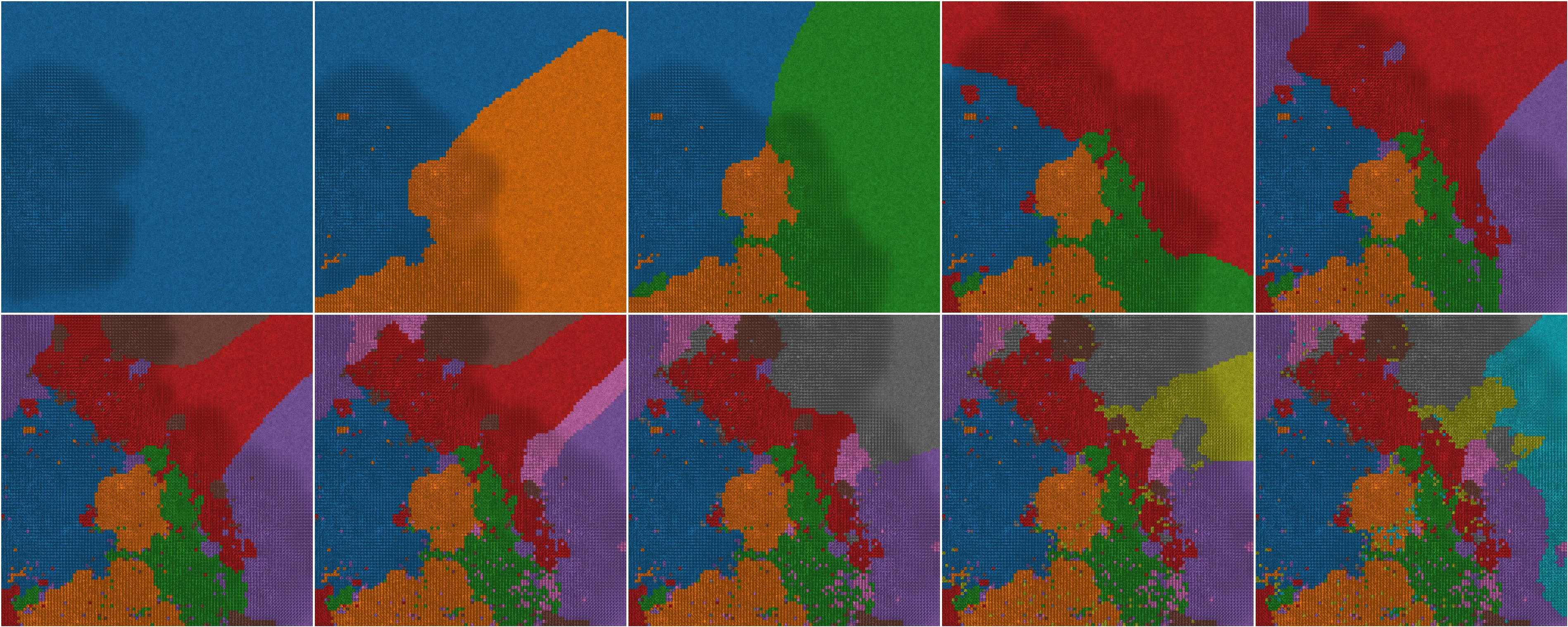
Results of my Master's degree research in Continual Learning, showcasing a novel ML architecture.
The article highlights some important observations into what drives knowledge retention, at least for self-organizing maps.
DOI: 10.2478/jaiscr-2026-0015
Paper (JAISCR, open access) PresentationOmnidirectional Autonomous Navigation With Multi-Camera RGBD Odometry
I. Urbanik, M. Gibiec
2024 15th Annual Undergraduate Research Conference on Applied Computing (URC)
24-25 April 2024, Dubai, United Arab Emirates
Winner of the Best Full Paper award

Photo: Katarzyna Sadowy, KSAF
The culmination of my work at AGH Space Systems.
Describes the process of merging RGBD data from multiple cameras into a single localization system.
Gives insight on using omnidirectional-like drives for robots.
Includes multiple practical remarks for the implementation.
DOI: 10.1109/URC62276.2024.10604488
Paper (IEEE Xplore)Autonomous Navigation of the Kalman Planetary Rover [PL]
S. Bednorz, I. Urbanik
II Student's Space Conference
20-21 October 2022, Wroclaw, Poland

Photo: Natalia Deyna, KSAF
My first little paper :)
Describes the general concepts of Kalman Rover's autonomous navigation.
Conference book